クロソイド曲線
- 自動車を運転することがある。
- その際に、高速道路の上を運転することがある。
- 高速道路は、まっすぐの道以外にも、曲がりくねった道がある。
- その曲がり方に関わりがあるのが、クロソイド曲線だ
- 知りたい。
- 始めましょうか。
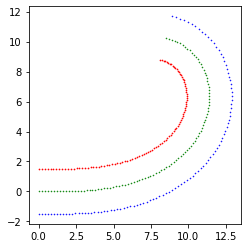
- クロソイド曲線
- お絵かきしてみる。
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import math
# figureを生成する
fig = plt.figure()
# axをfigureに設定する
ax = fig.add_subplot(1, 1, 1)
D = 3;v = 200
T = 100;k = 0.0003;dt = 0.001
x1 = [0 for i in range(T)]
x2 = [0 for i in range(T)]
x3 = [0 for i in range(T)]
y1 = [0 for i in range(T)]
y2 = [0 for i in range(T)]
y3 = [0 for i in range(T)]
z = [0 for i in range(T)]
y2[0] = D/2
y3[0] = -D/2
for t in range(T-1):
x1[t+1] = x1[t] + v *math.cos(k*t**2)*dt
y1[t+1] = y1[t] + v *math.sin(k*t**2)*dt
x2[t+1] = x1[t+1] - D/2*math.sin(k*t**2)
y2[t+1] = y1[t+1] + D/2*math.cos(k*t**2)
x3[t+1] = x1[t+1] + D/2*math.sin(k*t**2)
y3[t+1] = y1[t+1] - D/2*math.cos(k*t**2)
# axesに散布図を設定する
ax.scatter(x1, y1, s=0.3, c='g')
ax.scatter(x2, y2, s=0.5, c='r')
ax.scatter(x3, y3, s=0.3, c='b')
# 表示する
plt.show()
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import math
# figureを生成する
fig = plt.figure()
# axをfigureに設定する
ax = fig.add_subplot(1, 1, 1)
D = 3;v = 200;h = 1.5
b = 1#車の先端から目の距離
T = 100;k = 0.0003;dt = 0.001
x1 = [0 for i in range(T)]
x2 = [0 for i in range(T)]
x3 = [0 for i in range(T)]
y1 = [0 for i in range(T)]
y2 = [0 for i in range(T)]
y3 = [0 for i in range(T)]
z = [0 for i in range(T)]
y2[0] = D/2
y3[0] = -D/2
for t in range(T-1):
x1[t+1] = x1[t] + v *math.cos(k*t**2)*dt
y1[t+1] = y1[t] + v *math.sin(k*t**2)*dt
x2[t+1] = x1[t+1] - D/2*math.sin(k*t**2)
y2[t+1] = y1[t+1] + D/2*math.cos(k*t**2)
x3[t+1] = x1[t+1] + D/2*math.sin(k*t**2)
y3[t+1] = y1[t+1] - D/2*math.cos(k*t**2)
def Eye(x,y,z):
r = math.sqrt(y**2+z**2)
#return [math.sin(theta)*math.cos(phi),math.sin(theta)*math.sin(phi)]
return [-theta*math.cos(phi),theta*math.sin(phi)]
#return [theta,phi]
x4 = [0 for i in range(T)]
x5 = [0 for i in range(T)]
x6 = [0 for i in range(T)]
y4 = [0 for i in range(T)]
y5 = [0 for i in range(T)]
y6 = [0 for i in range(T)]
for i in range(T):
x4[i],y4[i] = Eye(x1[i]+b,y1[i],-h)
x5[i],y5[i] = Eye(x2[i]+b,y2[i],-h)
x6[i],y6[i] = Eye(x3[i]+b,y3[i],-h)
"""
for i in range(T):
x1[i] = Eye(x1[i]+b,y1[i],-h)[0]
y1[i] = Eye(x1[i]+b,y1[i],-h)[1]
x2[i] = Eye(x2[i]+b,y2[i],-h)[0]
y2[i] = Eye(x2[i]+b,y2[i],-h)[1]
x3[i] = Eye(x3[i]+b,y3[i],-h)[0]
y3[i] = Eye(x3[i]+b,y3[i],-h)[1]
"""
# axesに散布図を設定する
"""
ax.scatter(x1, y1, s=0.3, c='g')
ax.scatter(x2, y2, s=0.5, c='r')
ax.scatter(x3, y3, s=0.3, c='b')
"""
ax.scatter(x4, y4, s=0.3, c='g')
ax.scatter(x5, y5, s=0.5, c='r')
ax.scatter(x6, y6, s=0.3, c='b')
ax.set_ylim(-1.1,0.3)
# 表示する
plt.show()
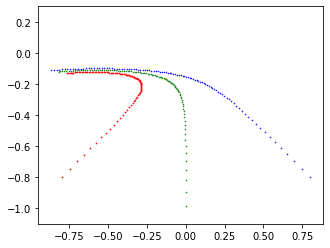
クロソイド曲線を走っていると、だんだんと先が見えない。
前に車や障害物があるかもしれないが、それが遠くては見えない。
スピードを出し過ぎず、安全な速度で、前方を確認しながらハンドルを切ろうね。
バイバイ!